计算电磁学(Computational Electromagnetics, CEM)是通过数值计算来研究电磁场的交叉学科。
数值求解电磁学问题的方法可以分成频域(Frequency Doamin, FD)、时域(Time Domain, TD)等两类。
频域法基于时谐微分,通过对多个采样值的傅里叶逆变换得到所需的脉冲响应,使用这种方法,每次计算只能求得一个频率点上的响应。这类方法又可进一步分成低频算法、高频算法等两类。低频算法包括矩量法(Method of Moment, MoM)、频域有限差分(Finite Difference Frequency Doamin, FDFD)等;高频算法包括几何光学法、物理光学法等。
时域法按时间步进求得有关场量,一次求解可以获得很宽频带范围内的解。这类方法包括时域有限差分(Finite Difference Time Domain,FDTD)、时域有限单元(Finite Element Time Domain,FETD)等。
在时域法中,最为著名的就是FDTD。因此,本文拟对FDTD算法涉及的数理模型、数值模型等内容进行简要介绍。
注1:限于研究水平,分析难免不当,欢迎批评指正。
注2:文章内容会不定期更新。
一、物理方程
1864年,Maxwell在前人理论和实验的基础之上,建立了统一的电磁场理论,并用一组数学方程揭示了宏观电磁场的基本规律,这就是著名的Maxwell方程组。
Maxwell方程组有四个方程组成:描述电荷如何产生电场的高斯定律;论述磁单极子不存在的高斯磁定律;描述电流和时变电场怎样产生磁场的安培环路定律;描述时变磁场如何产生电场的法拉第感应定律。
对于各向同性线性介质,物性方程为,
在上述公式中,各符号含义如下:
| 电感强度 | ||
| 电荷密度 | ||
| 磁感强度 | ||
| 电场强度 | ||
| 磁场强度 | ||
| 传导电流密度 | ||
| 介电常数 | 在真空中, | |
| 磁导率 | 在真空中, | |
| 电导率 |
在三维笛卡尔坐标系下,有
二、数值模型
FDTD是美籍华人K.S. Yee 于1966 年提出的求解微分形式Maxwell方程组的数值方法。FDTD在时域上直接求解微分形式的Maxwell方程组,
2.1 空间离散
在FDTD中,Yee使用Yee Cell在空间上交叉布置电场、磁场分量。电场分量放置到Yee单元各棱的中间,方向平行于各棱;磁场分量放置到Yee单元各面中心,方向平行于各面法线。
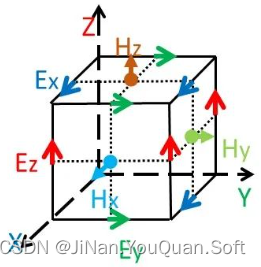
这样,每个电场分量由四个磁场分量环绕;每个磁场分量也由四个电场分量环绕。
对于麦克斯韦-安培定律与法拉第电磁感应定律,采用中心差分来离散磁场旋度与电场旋度。
为对于编号为的Yee Cell,其中
,
,
,
、
、
为计算域在三个坐标轴方向的网格数,
可得法拉第感应定律、安培定律在空间域上的半离散格式,
2.2 时间离散
在时间域上,FDTD采用蛙跳格式,由此可得法拉第感应定律、安培环路定律在时间域上的半离散格式,
2.3 FDTD差分方程组
结合法拉第感应定律、安培环路定律在空间域、时间域上的离散格式,可得最终差法方程组,
2.4 边界条件
由于数值模拟只能选取有限区域作为计算域进行仿真计算,因此,在计算域边界处,需要给出吸收边界条件。
目前效果最好的吸收边界层是Berenger于1994年提出的完美匹配层(Perfect Matched Layer, PML)。完全匹配层是数学上在FDTD区域截断边界处虚拟设置一种特殊介质层,通过合理地选择PML的本构参数,能够使FDTD计算域的外行电磁波无反射地穿过分界面,并在吸收层内被迅速吸收分解。
2.5 源项处理
根据源项随时间的变化,源项可分为周期性源项和非周期性源项。
根据源项几何形状,可分为点源、线源、面源等。
2.6 收敛性、稳定性条件
设为计算空间内电磁波最大传播速度,
为时间步2长,
为网格尺寸,则有
对于三维均匀网格,时间步长、网格尺寸
需要满足Courant条件:
。
对于二维均匀网格,时间步长、网格尺寸
需要满足Courant条件:
。
对于二维均匀网格,时间步长、网格尺寸
需要满足Courant条件:
。
三、实现与测试
参考文献
- K S Yee .Numerical solution of initial boundary value problems involving maxwell's equations in isotropic media[J].IEEE Transactions on Antennas & Propagation, 1966, 14(5):302-307.DOI:10.1109/TAP.1966.1138693.
- 赖生建. 计算电磁学讲义.
- 梁铨廷. 物理光学(第五版). 2018
网络资料
- XFDTD
- FDTD++
- openEMS
- Meep