边缘检测是在电脑如何理解图片这一问题中的一环,它帮助电脑找出照片里的轮廓和分界线。想象一下你在看一幅黑白漫画,轮廓线定义了每一个角色和物体,而电脑要做的,就是通过边缘检测来找出这些线条。这在很多像是图像分析这样的领域里,尤其是在我们需要电脑识别和区分图片中不同物体时非常关键。OpenCV是一个功能强大的工具箱,它可以通过一些算法帮助我们实现边缘检测,这里我们会介绍两种常见的方法:Canny边缘检测和Sobel边缘检测。
边缘检测
接下来,让我们深入了解这两种方法的工作原理:
1. Canny边缘检测:
Canny边缘检测算法是处理图像边缘获取最为著名的技术之一,它的名字就源自发明者John F. Canny。这个算法很聪明,它不只是简单地找边缘线,而是有一套完整的步骤来确保最后找到的边缘既清晰又准确。首先,它会用一种名叫高斯滤波的技术,像用软布擦拭镜头一样,平滑图片以减少杂乱的噪声点。接着,它就像用放大镜观察图像,来计算图片中每一点周围的变化程度,这有助于揭示出哪些地方是潜在的边缘。然后,Canny算法会用一个特殊的方法筛选这些潜在边缘,确保边缘线条尽可能细且明确。最后,它会类似于使用智能滤镜,通过设定两个门槛值来决定哪些边缘是真正值得保留的。在OpenCV里,你可以直接调用cv2.Canny()函数来使用这个算法。
2. Sobel边缘检测:
Sobel边缘检测算法则更像是数学家的工具,它依靠计算图像亮度变化的速度——或者说图像梯度,来识别边缘。想象你在骑车遇到一个坡度变化,坡的陡峭程度就像是图片亮度变化的速度。Sobel算子使用两个小的网格(3x3的卷积核)来分别测量图片中每一点水平方向和垂直方向的“坡度”。一种核心专注于发现垂直方向的边缘,另一种则发现水平方向的边缘。把这两种检测结果结合起来,就能得到一幅清晰显露出所有边缘的图像。在OpenCV中,这可以通过调用cv2.Sobel()函数来实现。
程序实现:
下面通过一个程序来演示边缘检测技术。
python程序代码
下面是使用Python和OpenCV实现Canny边缘检测和Sobel边缘检测的示例代码:
# -*- coding: utf-8 -*-
"""
Created on Fri Feb 16 21:44:22 2024@author: 李立宗公众号:计算机视觉之光知识星球:计算机视觉之光"""import cv2
import numpy as np# 读取图像
image = cv2.imread('lena.bmp', 0)# Canny边缘检测
canny_edges = cv2.Canny(image, 100, 200)# Sobel边缘检测
sobel_x = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=3)
sobel_y = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=3)
sobel_edges = np.sqrt(sobel_x**2 + sobel_y**2).astype(np.uint8)# 显示原始图像和边缘检测结果
cv2.imshow('Original Image', image)
cv2.imshow('Canny Edges', canny_edges)
cv2.imshow('Sobel Edges', sobel_edges)cv2.waitKey(0)
cv2.destroyAllWindows()
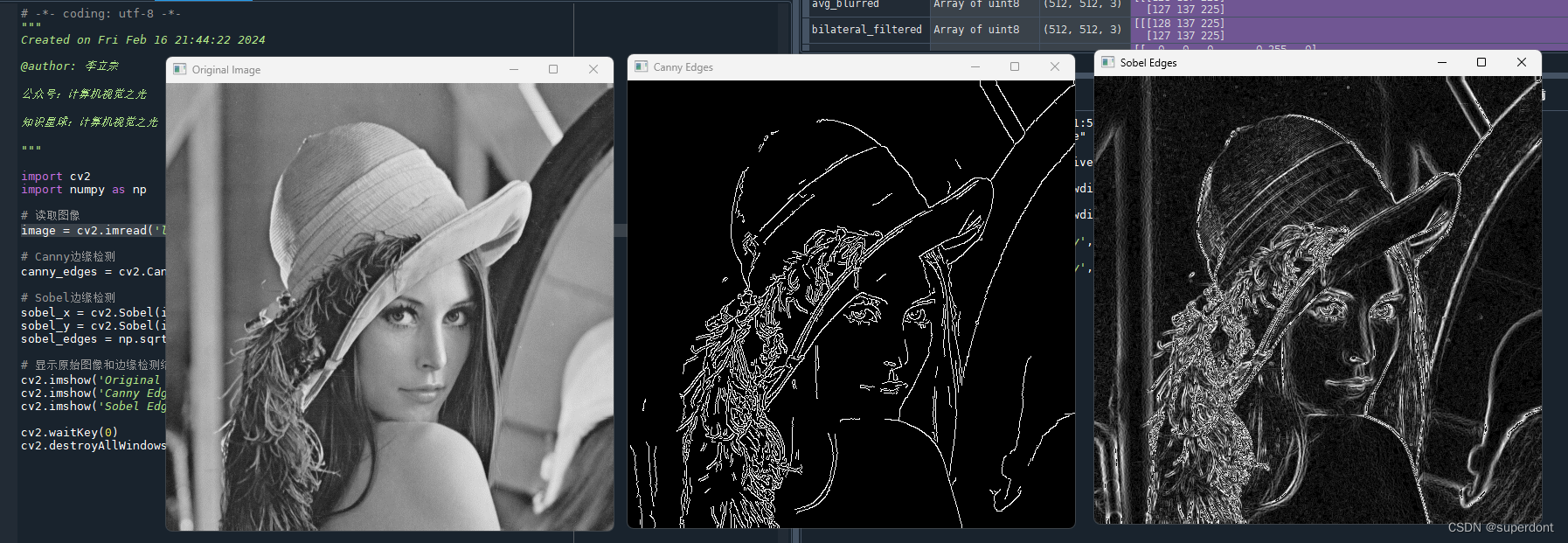
程序演示
可以看到通过各种不同的边缘检测所获取的效果。
小结
在这个示例中,我们读取了一张灰度图像,并分别使用Canny边缘检测和Sobel边缘检测算法进行了边缘检测。最后,将原始图像和边缘检测结果展示出来。
结论:
边缘检测是计算机视觉中重要的技术之一,用于识别图像中的边缘和轮廓。其中,Canny边缘检测和Sobel边缘检测是常用的方法,它们在OpenCV中都有相应的实现。本博客介绍了这两种方法的理论原理,并给出了使用OpenCV实现边缘检测的示例代码。希望通过本博客的学习,初学者可以对OpenCV中的边缘检测有一个清晰的了解,并将其应用于自己的项目中。
相关知识点
理解并实现OpenCV中的图像平滑技术
参考文献
1、OpenCV轻松入门
李立宗,OpenCV轻松入门,电子工业出版社,2023
2、计算机视觉40例
李立宗,计算机视觉40例,电子工业出版社,2022